図1 |
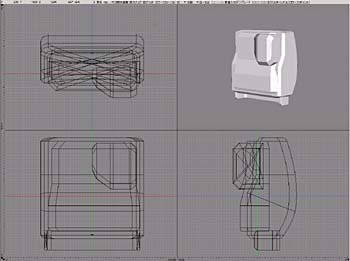
■掌パーツ製作
掌パーツを作ります。
手首の大元となるパーツです。 作例では汎用性を重視して、一般的なデザインにしていますが、特徴ある形状にすると個性が出て良いかもしれません。
|
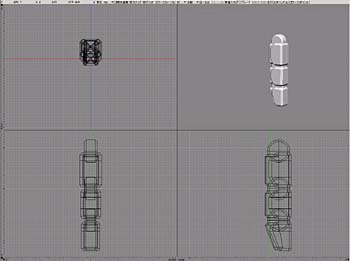
図2
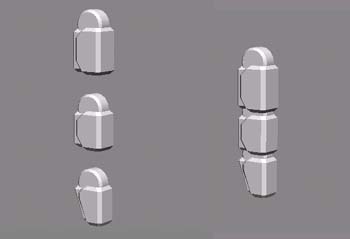
図3 |
■指パーツ製作
指パーツを作ります。関節は曲げても違和感がないように、円形のパーツをジョイントパーツ風に配置しています。
まず中指のモデルを作って回転パートで間接ごとに分けた後、コピー&ペースト→移動&縮小で他の指を作ると良いでしょう。 |
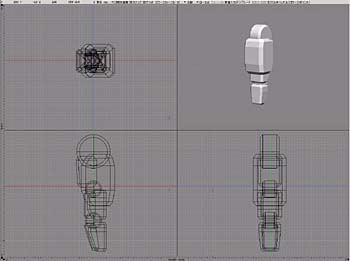
図5
|
■親指パーツ製作
親指は他の4本の指とは形状が違うので別途作ります。 |
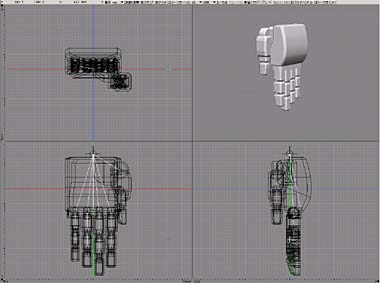
図6 |
■手首パーツのベース完成
掌と指を合わせて、間接を仕込みましょう。
手首パーツのベースが完成しました。
手首パーツは別名保存しておくと、今後作るロボットに使いまわしができて楽です。
(個人的に、手首って作るの面倒なんですよね(汗)) |
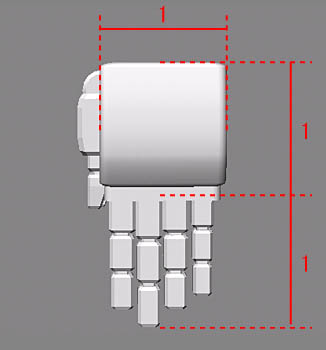
図7
|
■手首のバランス
掌の縦横と中指が1:1:1のバランスで手首のプロポーションを取ります。
指は、「付け根から第二間接」と「第二間接から指先まで」を1:1のバランスを基本にするとプロポーションが取り易いです。(ただし、作例ではこの基本から外しています。)
親指は掌から指先がやや飛び出すぐらいの長さでバランスを取ります。
以上は人間の美しいとされる手のプロポーションに準じています。
<参考書籍>
・人体のデッサン技法 / 嶋田出版
・こやさしい顔と手の描き方 / マール社
(余談ですが、「人体のデッサン技法」はすごく良書です。薄いので一見頼りなげですが、中身はものすごく充実しています。人体デッサンを勉強している方はもちろん、ロボットにしか興味がない方にもオススメです。人型ロボットは人間のプロポーションに準じている部分が多いので、読んでみると役に立つ知識が得られると思います。) |
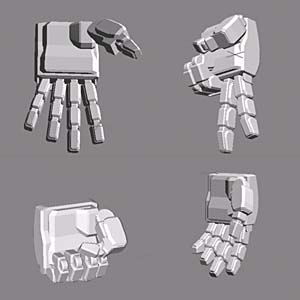
図8
|
■ポージング
ロボットの顔には表情がないため、手の表情付けが重要になります。
各関節名の先頭に「|」を付けて、且つ名前が重複しないように名前を付けます。
グー、パー、自然体等、良く使う手首のポーズを作って保存しておくと後々便利です。
ぜひやっておきましょう。
以上でロボットの基本となるパーツが揃いました。
次は出来たパーツを組んでプロポーションのバランスを取ります。 |