図1 |
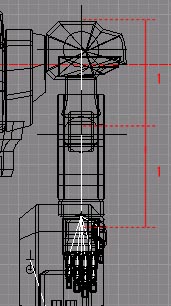
■腕のバランス調整
腕のバランスは「肩〜肘」:「肘〜手首」で1:1のバランスを基本とします。
そこから好みや、ロボットのキャラクター性に合わせて長さや太さを調整していきましょう。
手首を若干大きめのバランスにすると、安定性、かわいらしさ、カッコ良さが簡単に出せます。
ただ安易な方法なのでやりすぎると安っぽくなるので注意が必要です。 |
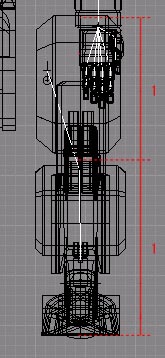
図2 |
■脚のバランス調整
脚のバランスは「脚の天辺〜膝」:「膝〜地面」で1:1のバランスを基本とします。
そこから好みや、ロボットのキャラクター性に合わせて長さや太さを調整していきましょう。
腕と同様、足首を若干大きめのバランスにすると、安定性、かわいらしさ、カッコ良さが簡単に出せます。
ただ安易な方法なので、やりすぎると安っぽくなるので注意が必要です。
腿とふくらはぎを太くしてメリハリを付けるとと力強さが出ます。
逆に腿とふくらはぎを細くするとスリムになります。
スネを若干長めに取るとスタイルが良くなります。
(個人的にはどっしりとした、短足で安定したプロポーションが好きなので、作例では1:1の基本を崩していません。) |
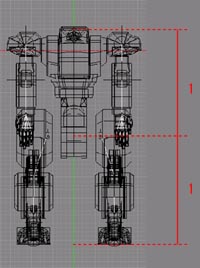
図3
|
■全体のバランス調整
全体のバランスは「頭〜股間」:「股間〜地面」を1:1のバランスを基本とします。
基本バランスとして、股間と同じ高さ程度に、手首をが来るように腕の長さを調整します。
そこから好みや、ロボットのキャラクター性に合わせて腕や脚の長さや太さを調整していきましょう。(作例のロボットは若干腕を短くしています。) |
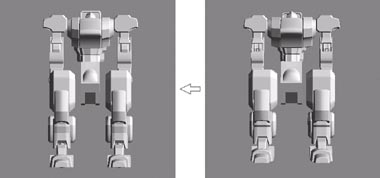
図4 |
■バランス調整 比較画像
図4右:調整前 左:調整後
1)足が太すぎるので、幅を詰めました。そして少しだけ脚を長くしました。
2)胸が若干大きすぎる感じがしたので、左右ブロックを幅詰めしました。
3)股間ブロックも大きすぎる感じがしたので小型化。
4)腹パーツが細すぎて弱々しいので、若干大型化。
その他は変更せずです。 |
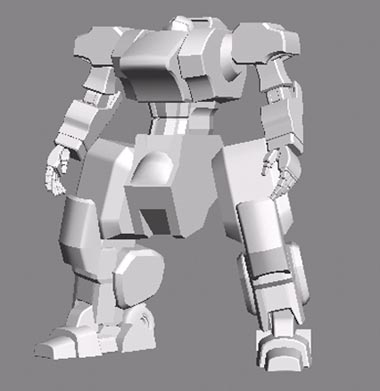
図5
|
■バランス調整前
個人的には全体的に太く、短足なプロポーションも力強そうで好きなのですが、ややマッシブすぎる感は否めません。
パワー型のキャラクター性のロボットならこれくらい太くらいでOKでしょう。
最初に描いたラフスケッチはこのくらい太いプロポーションです。 |
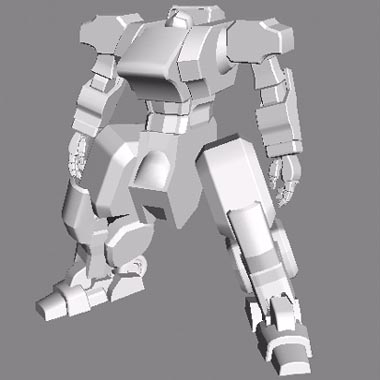
図6
|
■バランス調整後
スマートだけど、力強さは失わない程度のプロポーションを目指して調整しましたがいかがでしょうか?
今の流行だと、もっとスネを長くした方が良いかもしれませんね。
前ページでも書きましたが、人型ロボットの基本プロポーションは、やはり人間ですので、人間の美しいプロポーションの比率を勉強しておくと良いと思います。人物デッサンの本等に載っている美しいプロポーションの基本を、ぜひ頭に入れておきましょう。
オススメ書籍
・人体のデッサン技法 / 嶋田出版
・やさしい人物画 / マール社
以上で基本パーツは完成しました。
ではいよいよ、個人的には一番楽しいディテールアップに移りたいと思います。 |