図1 |
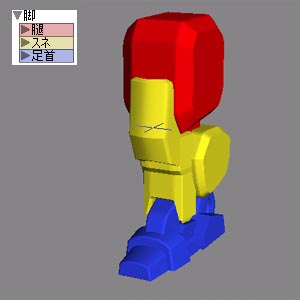
■各ブロックのパート分け
腿、スネ、足首の3つのブロックでパート分けします。
図ではわかり易いように色分けしています。 |
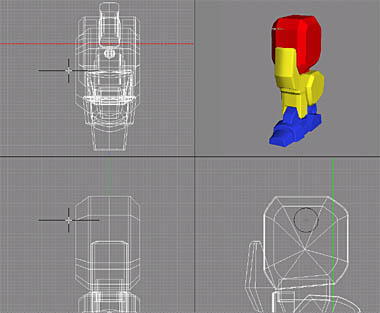
図2 |
■X軸方向の回転ジョイント
まず股間接にジョイントを仕込みます。
「パート/回転」を選び、股関節の支点になる位置から左方向(X軸マイナス方向)にドラックしていきます。
するとX軸方向に長い十字の線が描かれます。 |
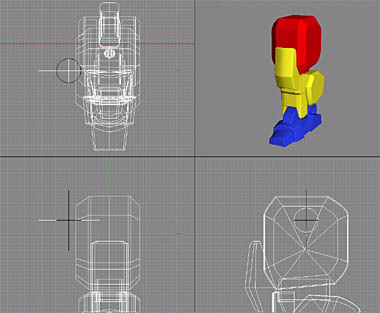
図3 |
■Y軸方向の回転ジョイント
次にX軸方向のジョイントと同じ中心の位置から、「パート/回転」を選び、上方向(Y軸プラス方向)にドラックしていきます。
するとY軸方向に長い十字の線が描かれます。 |
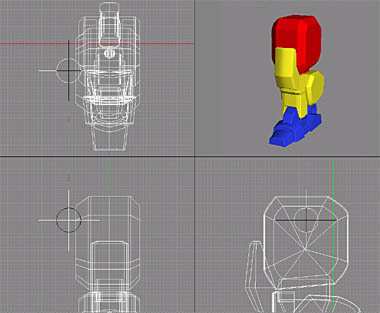
図4 |
■Z軸方向の回転ジョイント
さらにX軸方向、Y軸方向のジョイントと同じ中心の位置から、「パート/回転」を選び、前方向(Z軸プラス方向)にドラックしていきます。
するとZ軸方向に長い十字の線が描かれます。 |
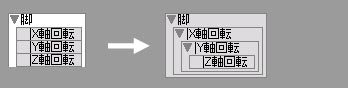
図5
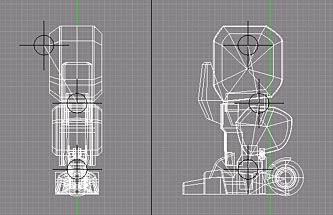
図6
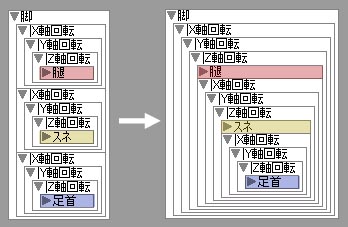
図7 |
■膝、足首間接
図5のようにX軸の中にY軸、Y軸の中にZ軸を内包させます。(出来た回転パートを、ここでは「3軸回転パート」と呼ぶことにします。)
その3軸回転パートをコピーペーストし、膝関節にあたる位置に移動させます。
さらにコピーペーストし、足首関節にあたる位置に移動させます。(図6)
次に図7左のように、1番上の3軸回転パートの最下層に腿ブロックを入れます。
2番目の3軸回転パートの最下層にスネブロックを入れます。
3番目の3軸回転パートの最下層に足首ブロックを入れます。
そして図7右のような親子関係に、各3軸回転パートを内包させます。
| 〇Tips -ポージングのために - |
ここまでで各関節のX、Y、Zの各軸回転パートを作りました。
各回転パートの名前の先頭には面倒でも必ず「|」を付けましょう。
完璧にするには、「|右腿X軸回転」や、「|左肘Y軸回転」といったように、「|+間接名+方向軸回転」と名前を付けておきましょう。
Shadeは回転パートの数値をインポート/エクスポートできるのですが、「|」が付いてる回転パートの数値のみインポート/エクスポートできます。
※名前が同じだと、ポーズのインポート/エクスポート処理がおかしくなるので「|」の後ろの間接名は被らないようにしましょう。
ロボットが完成したらポーズをつけることになるでしょう。そのとき「|+間接名+方向軸回転」と名前と付けていればポーズのインポート/エクスポートが出来るので、ものすごく助かるハズです。 |
|
図8 |
■自由に動く関節
これで股関節、膝関節、足首間接が自由に動かすことが出来るようになりました。
各回転パートを選択すると、ブラウザ左側にあるスライダーが操作できるようになります。操作して各関節が正常に動くかどうか試してみましょう。 |